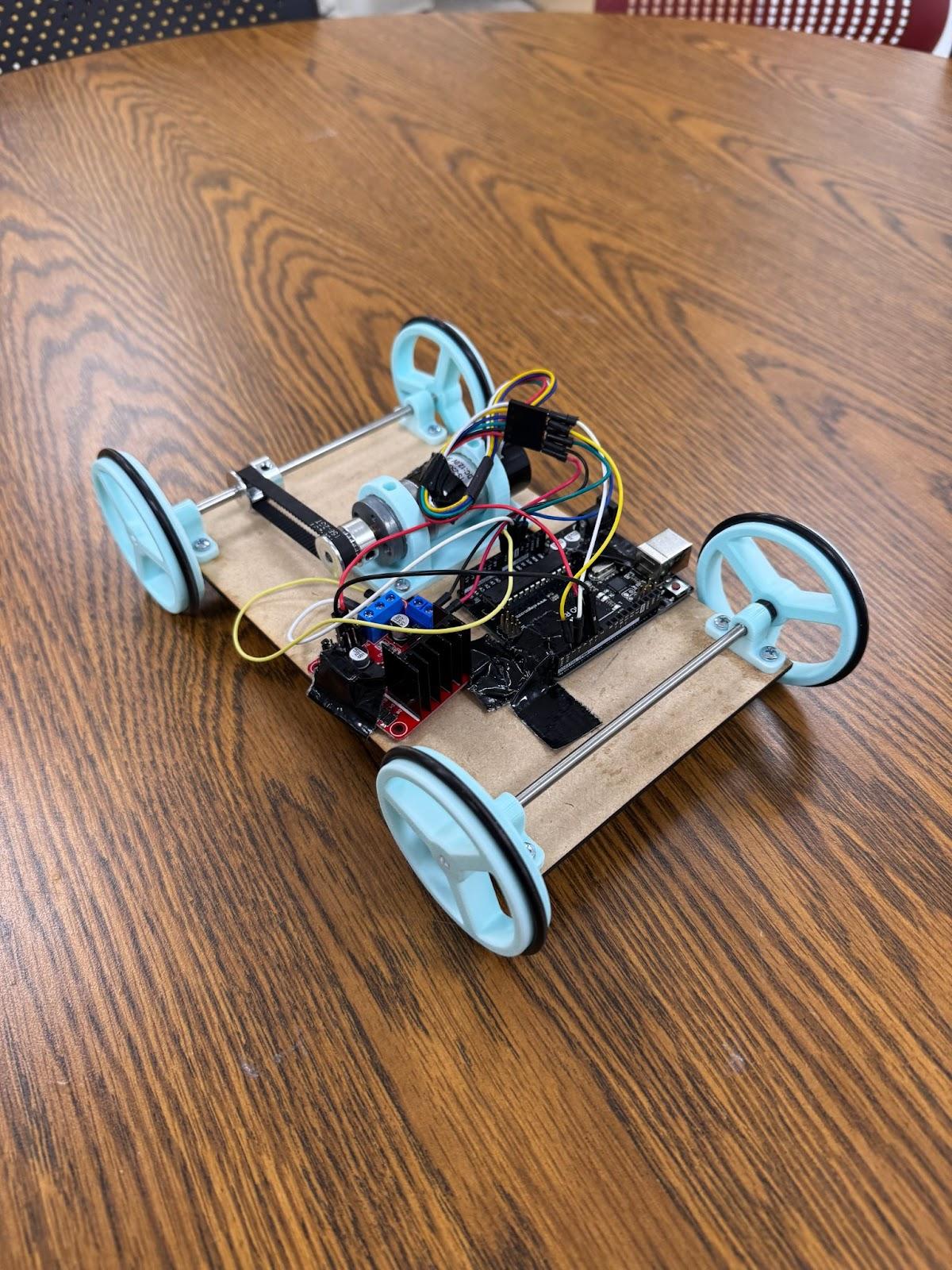
Arduino-controlled autonomous cart that transports a vertical rod using PID feedback control and precision motion analysis
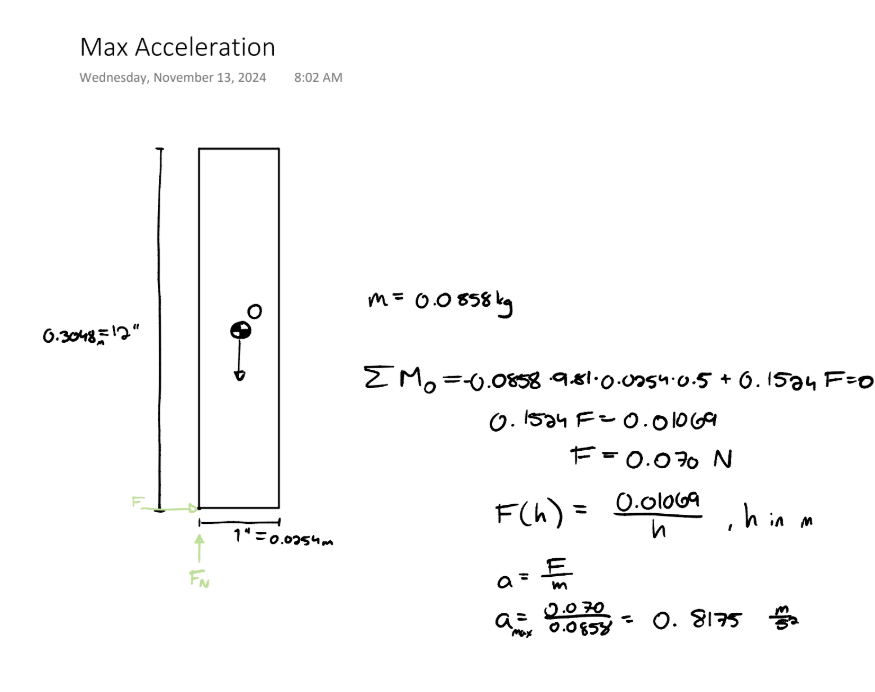
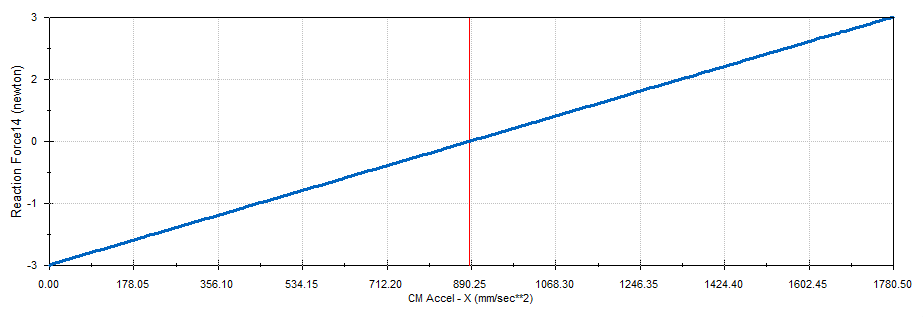
Designed and built an autonomous transport system to carry a 1-foot vertical aluminum rod across a distance of 5-10 feet at maximum speed without tipping. The system uses a PID (Proportional-Integral-Derivative) control algorithm implemented in Arduino to dynamically regulate motor speed, providing smooth acceleration and deceleration profiles that keep the rod stable throughout the run. SolidWorks motion analysis was used to model the system dynamics and inform controller tuning before physical testing, validating theoretical calculations with measured performance results.